1. 视觉
眼球结构: 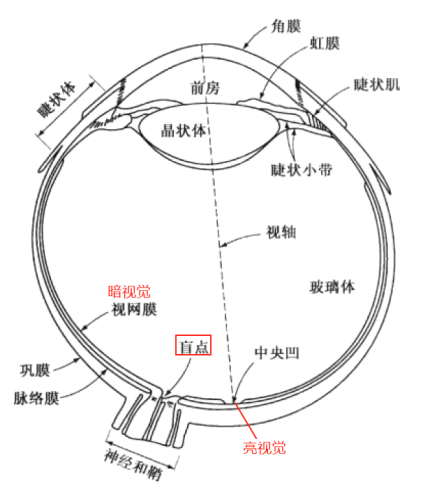 感受到的亮度 ==> 图像中的灰度
感受到的亮度 ==> 图像中的灰度
2. 数字图像
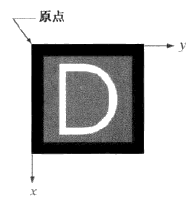
- 空间域:图像坐标的取值。
![3d89666da5a5f1aa36a0c6fb1fcd8043.png]() 将原点设置在图像左上角的原因:图像显示(电视显示器)扫描都是从左上角开始的,对应与阵列的左上角(第一个元素)。
将原点设置在图像左上角的原因:图像显示(电视显示器)扫描都是从左上角开始的,对应与阵列的左上角(第一个元素)。- 图像内插(放大、收缩、旋转、几何校正): 最近邻内插法、双线性内插法、双三次内插法。
3. 像素间的关系(领域-邻接-连通)
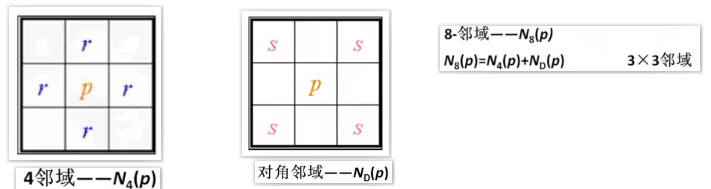
- 领域
![92469e5ec8a54057a3c46b205fa632e0.png]()
![d8cfc5ff4b87d7d87d502222b2d05925.png]()
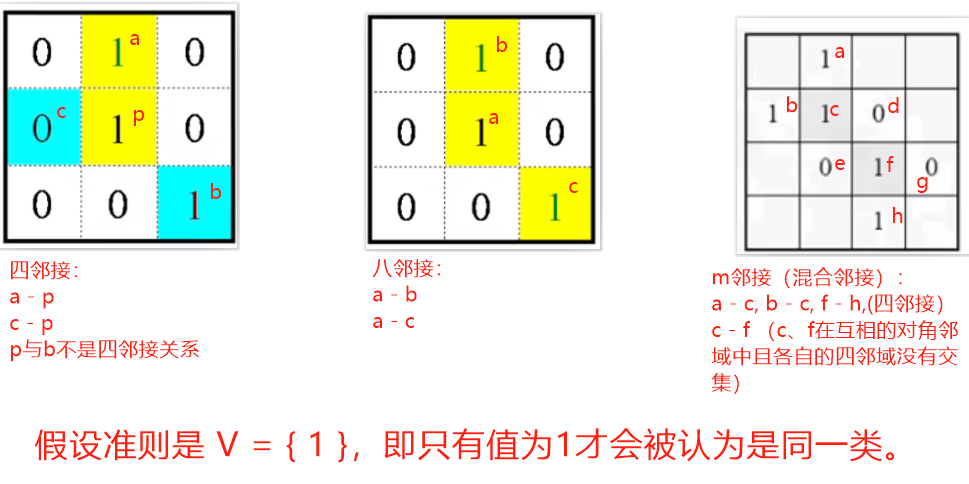
- 邻接
![4891085e0f79afc8ffbd6ee600ff10fe.png]()
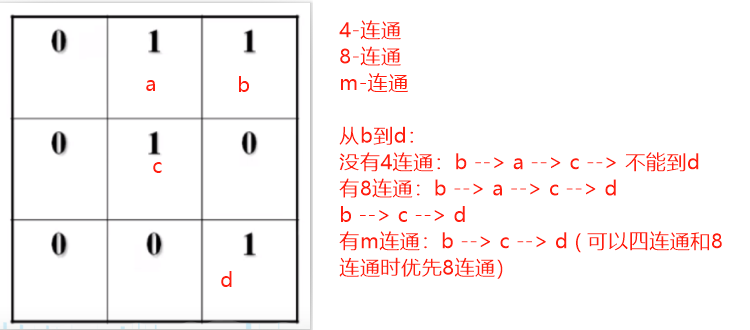
- 连通
![449d4063f1e8842260bed2df8047f15d.png]()
4. 距离度量
- 欧式距离
![e5a5facda87a776d5c0016777f1092f7.png]()
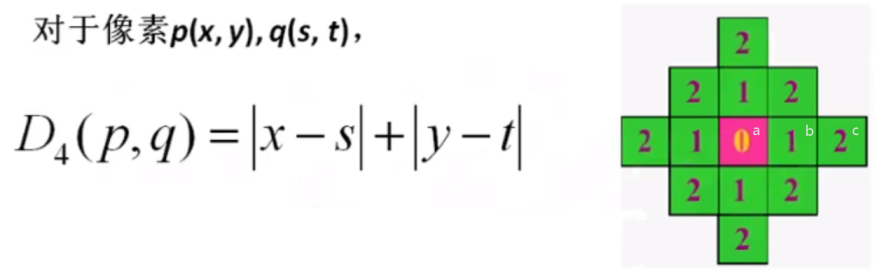
- 城市距离
![262ec6a4fcc068e59e55f6f8f55afa0e.png]() a与b距离是1,a与c距离是2。
a与b距离是1,a与c距离是2。5. 数学工具
- 数字图像处理是阵列操作,不是矩阵操作。 阵列操作:
![f64045725b94802a7b15e5fb1a4d7fed.png]()
- 线性操作(H是一个函数,一个算法,一种处理手法)
![3aef63bc7fe90cddeab14dfc4d710582.png]()
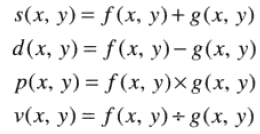
- 算术操作(阵列操作)
![44f5d9f97654235004188d9e3b0aa822.png]() 1)使用相机拍摄同一张图像,将所拍的这些图像灰度化并相加,再每个像素点取平均,能消除图像噪声。
1)使用相机拍摄同一张图像,将所拍的这些图像灰度化并相加,再每个像素点取平均,能消除图像噪声。 ![ae7cc3a1a5ce9db85f5172579b023759.png]() 2)图像相减 ==> 增强 3)图像相乘 ==> ROI
2)图像相减 ==> 增强 3)图像相乘 ==> ROI ![d5832358f2e81a1e280518107283e49d.png]() 4)图像相除
4)图像相除 - 空间操作 1)单像素操作
![88f7c4dc167fa9430622dc2be7f08f7e.png]() T()是处理方法。 2)邻域操作 将一副图像分成很多个邻域,每个邻域经过函数T()变成一个灰度值。
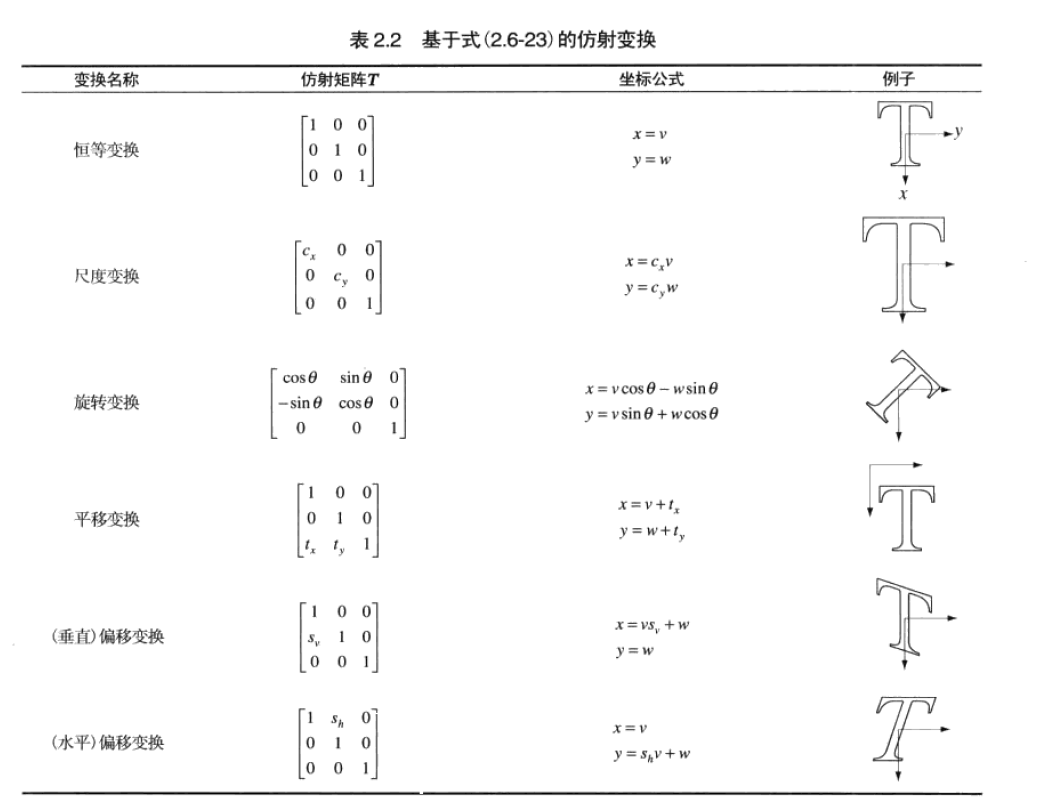
T()是处理方法。 2)邻域操作 将一副图像分成很多个邻域,每个邻域经过函数T()变成一个灰度值。 ![a2da5aaf5e90aae4af0f0c59b0ee4360.png]() 3)几何空间变换 空间坐标变换 ==> 仿射变换:
3)几何空间变换 空间坐标变换 ==> 仿射变换: ![3d7bb81765d15d129c3d3ca59e54bef3.png]()
![bdb40394994b064023c2ee732707d5af.png]() 仿射变换需要和图像内插相结合。 4) 图像配准(目的是找到畸变函数,然后将畸变图像变回来)
仿射变换需要和图像内插相结合。 4) 图像配准(目的是找到畸变函数,然后将畸变图像变回来) ![707497780f85a3dda29125531a2071a6.png]()
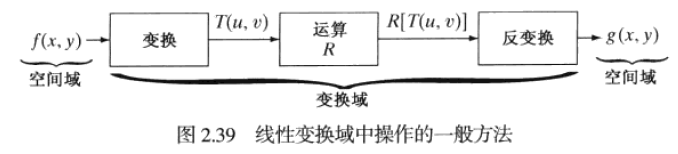
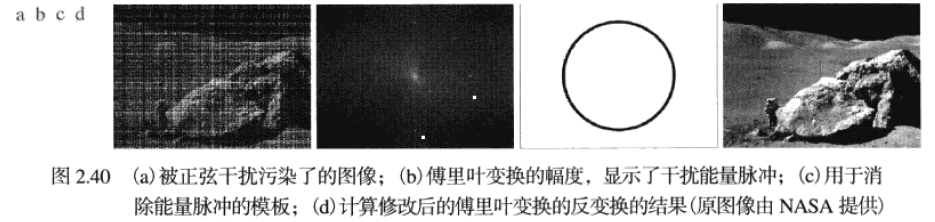
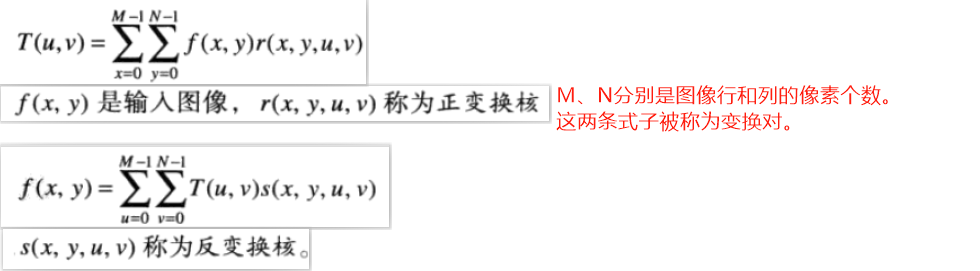
- 图像变换 ==> 将空间域的图像转化到变化域上进行处理,再返回到空间域 公式:
![9d8e1d60a42fca9bab73769fe7178fd4.png]() 流程:
流程: ![f5d37b2b3c81891a5d1aefd597561060.png]()
![4a70b5cbc31dac2cd133d4856ca9f9b1.png]()
- 概率方法 ==> 假设图像的噪声是随机分布的,那就要找到那个分布函数
 将原点设置在图像左上角的原因:图像显示(电视显示器)扫描都是从左上角开始的,对应与阵列的左上角(第一个元素)。
将原点设置在图像左上角的原因:图像显示(电视显示器)扫描都是从左上角开始的,对应与阵列的左上角(第一个元素)。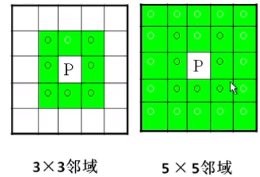
 a与b距离是1,a与c距离是2。
a与b距离是1,a与c距离是2。

 1)使用相机拍摄同一张图像,将所拍的这些图像灰度化并相加,再每个像素点取平均,能消除图像噪声。
1)使用相机拍摄同一张图像,将所拍的这些图像灰度化并相加,再每个像素点取平均,能消除图像噪声。 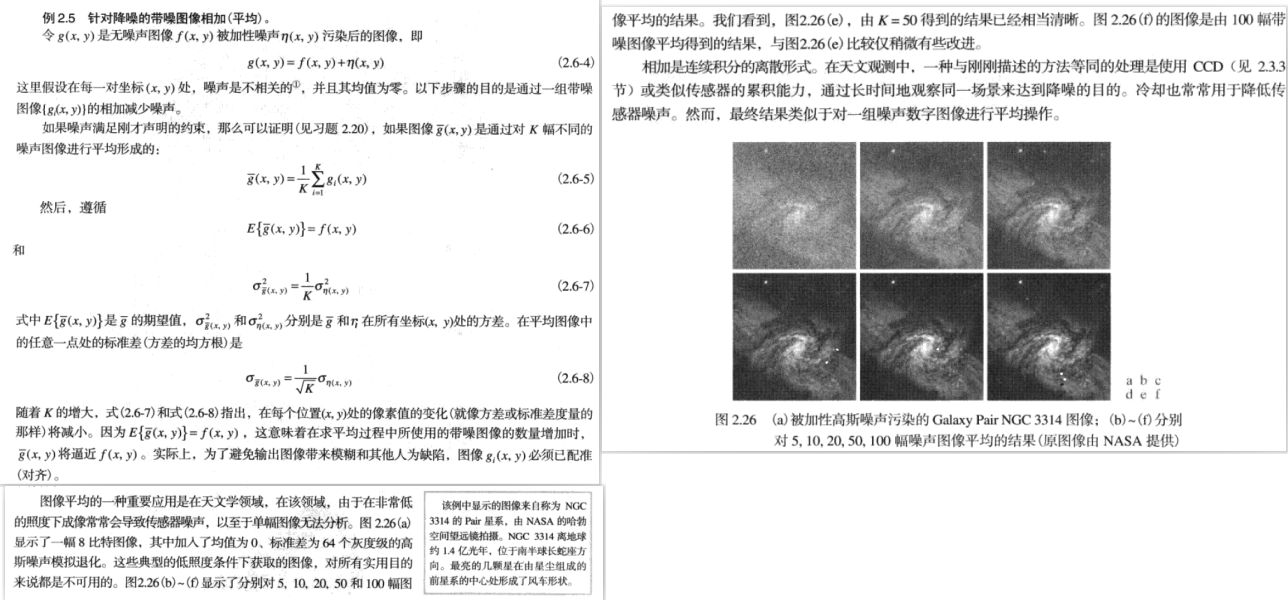 2)图像相减 ==> 增强 3)图像相乘 ==> ROI
2)图像相减 ==> 增强 3)图像相乘 ==> ROI 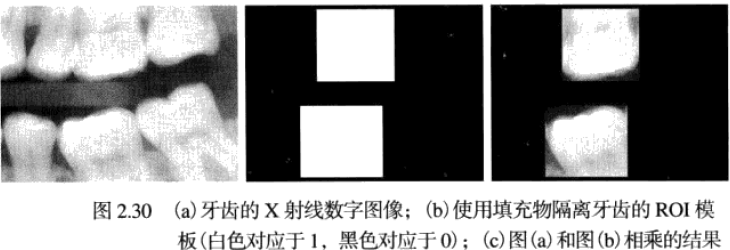 4)图像相除
4)图像相除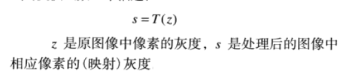 T()是处理方法。 2)邻域操作 将一副图像分成很多个邻域,每个邻域经过函数T()变成一个灰度值。
T()是处理方法。 2)邻域操作 将一副图像分成很多个邻域,每个邻域经过函数T()变成一个灰度值。  3)几何空间变换 空间坐标变换 ==> 仿射变换:
3)几何空间变换 空间坐标变换 ==> 仿射变换: 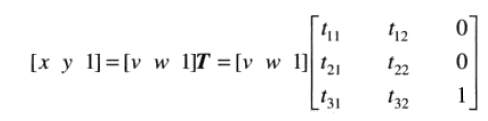
 仿射变换需要和图像内插相结合。 4) 图像配准(目的是找到畸变函数,然后将畸变图像变回来)
仿射变换需要和图像内插相结合。 4) 图像配准(目的是找到畸变函数,然后将畸变图像变回来) 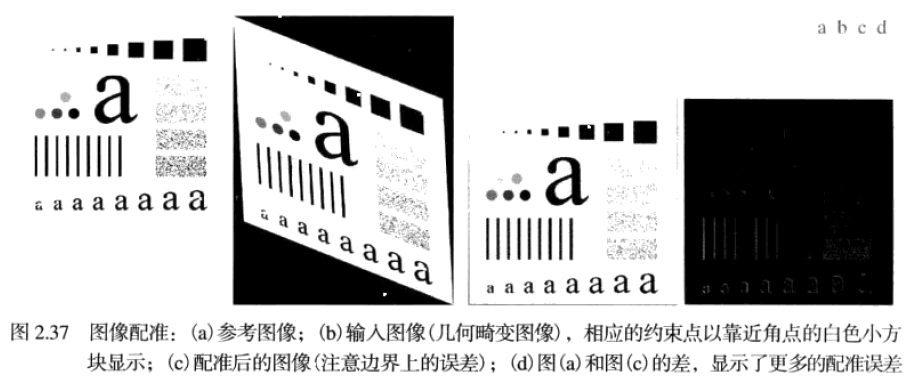
 流程:
流程: